







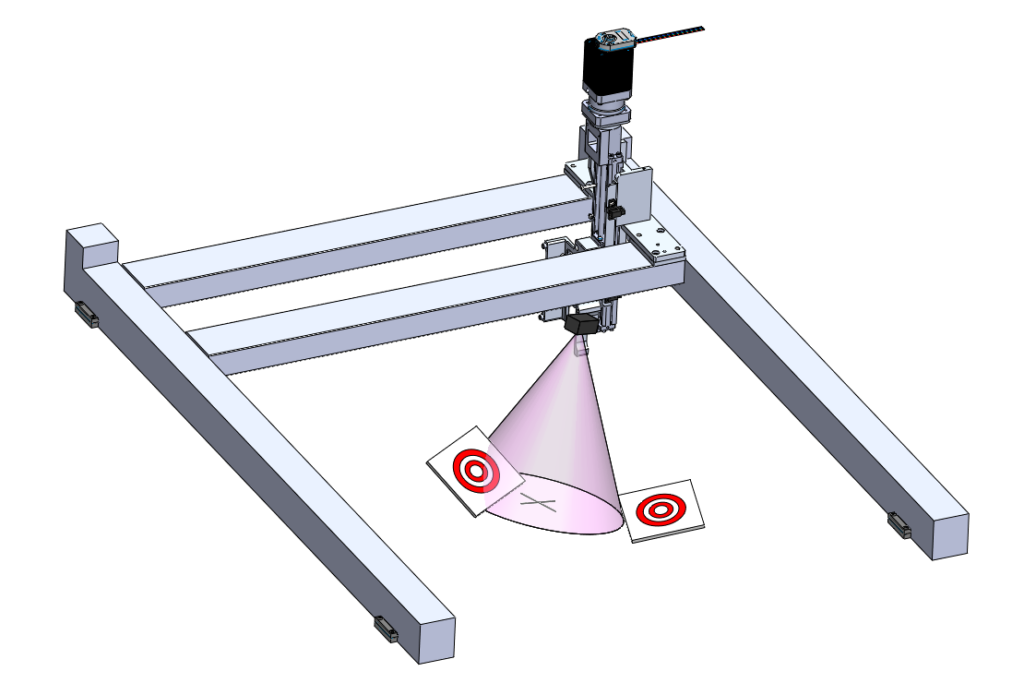
Ascential is proud to tackle some of the most complex engineering challenges. Recently, our team developed a cutting-edge calibration system for a gantry robot, one of the main components of a client’s diagnostic device. A gantry robot is a type of robotic system that uses a framework consisting of multiple axes to perform precise movements across a large work area. In this device, the gantry robot is responsible for pick-and-place operations across several precise positions.
The Challenge: Precise Calibration in a Complex System
The analyzer presented a significant challenge: its pick-and-place gantry robot needed to move objects between multiple defined locations with near-perfect accuracy. If the calibration was even slightly off, the robot could fail to position objects correctly, leading to operational inefficiencies and potential downtime. The traditional manual calibration process was time-consuming, required skilled operators, and had a high risk of human error. What the system needed was a more intuitive, scalable, and precise method to ensure consistent performance.
Our Solution: Computer Vision
To address these challenges, our engineers implemented a marker-based position tracking system that used computer vision to guide the calibration process. Here’s how it worked:
- Marker Detection: The system used a standard USB camera mounted on the robot’s gripper. This camera was used to detect markers placed in locations that needed calibration. These markers, identified using a sophisticated algorithm, allowed the system to determine the exact position of the object in relation to the camera.
- Pose Estimation: Once the marker was detected, the system used pose estimation techniques to translate the marker’s position in the camera’s view into real-world coordinates. This enabled the gantry robot to understand its position within the broader environment, allowing for precise adjustments.
- Calibration Feedback: Real-time visual feedback was provided to the operator, displaying both the current and desired positions of the markers. The operator was guided to align the markers through an intuitive visual interface, ensuring easy and quick calibration. The system provided crosshair visual markers for precise alignment and highlighted any deviation from the target position, allowing for fine adjustments.
- Data Storage and Repeatability: Once the optimal position was reached, the calibration data was saved to the system’s memory with a resolution of microns. This ensured that the robot would return to the precise location every time to perform pick-and-place tasks, significantly improving the device accuracy and eliminating the need for frequent recalibrations. In addition, this method allowed for better repeatability compared to the manual methods previously used, as the system eliminated the potential for operator variability.
The Results: Improved Accuracy and Efficiency
By implementing this computer vision calibration system, Ascential achieved several key benefits for our client:
- Improved Accuracy: The camera-based alignment process proved significantly more precise than traditional manual methods. The use of markers and real-time feedback ensured that the robot consistently positioned objects within extremely tight tolerances.
- Reduced Training: The system’s intuitive user interface reduced the need for extensive training for operators and field support engineers. With visual guides and automatic feedback, operators could quickly and easily calibrate the machine, ensuring that it was always ready for operation.
- Faster Calibration Time: The automated guidance reduced the time spent calibrating the system to less than half of the time required with the previous method, allowing for faster production cycles and minimizing downtime. This was especially beneficial in high-volume manufacturing environments.
- Potential for Full Automation: The system also provided a foundation for future fully automated calibration, further reducing the need for manual intervention and boosting efficiency.
This project showcases how Ascential’s engineering prowess drives solutions that blend technical precision with operational efficiency. By developing a custom calibration system using advanced computer vision and marker-based position tracking, our client was able to reduce operational complexity, enhance product quality, and streamline production.
Whether you’re looking to automate a specific task or develop a full-scale system, our engineering team is ready to design innovative solutions for your most complex projects.